斗輪機定位系統解決方案
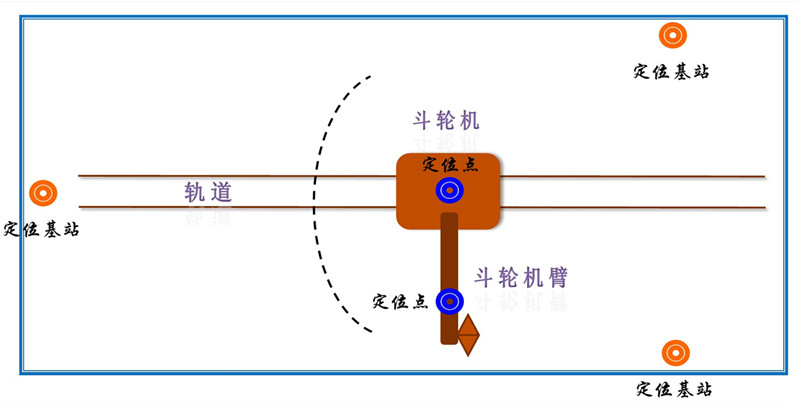
煤場斗輪機定位系統的建立目的:通過定位斗輪機在軌道的位置,以及定位斗輪機斗輪取煤區域的位置,從而實時獲取各區域的取煤位置信息,計算各區域向原煤倉的輸煤量和不同煤種的儲煤量。有了斗輪機精確的位置信息以后,還能實現斗輪機的防碰撞保護,避免生產安全事故的發生。
目前斗輪機位置檢測大多采用的是人眼定位、激光位移傳感器、行走限位開關、RFID方式、加裝刻度標尺精確定位系統的檢測技術。
以上幾種位置檢測方式均存在一定的缺陷,具體表現為:
①人眼定位受制于眼睛健康狀況和精神狀態,環境影響比較大,作業時間長;
②激光位移傳感器在不潔凈環境會失去作用,軌道沉降導致車輛走行抖動會使反光板靶位不準,亦會導致位置檢測不準;
③行走限位開關由于是點定位,對連續性位置檢測存在盲區;
④RFID方式是無線點定位,存在漏讀現象, 延時較大;
⑤加裝刻度條方式成本高,安裝復雜,在現場惡劣的環境下容易磨損。
封閉煤場內部斗輪機定位解決方案
斗輪機在封閉煤場內部無法采用衛星定位技術,基于室內的各種定位技術中目前精度最高、最成熟的為UWB定位技術。UWB無線定位的一般精度為10cm,最高精度可達到5cm以內。
UWB無線定位原理:無線基站位置已知,標簽發出無線脈沖信號,根據標簽到達每個基站的時間乘以光速,得到標簽至每個基站的距離,再通過算法求解,最終得到標簽的位置,從而實現標簽定位。