
斗輪堆取料機無人值守系統(tǒng)應用方案
1.應用背景
隨著科技的進步,煤礦、碼頭、火力發(fā)電廠、熱電廠等需要對煤炭進行存儲、周轉(zhuǎn)的場所,自動化程度越來越高,人工操作的方式已經(jīng)無法滿足社會經(jīng)濟日益發(fā)展的需求。受國際貿(mào)易全球化、原料價格大幅波動、人工成本上漲等因素的影響,降低生產(chǎn)成本提高社會經(jīng)濟效益成為企業(yè)發(fā)展壯大的重要因素。斗輪堆取料機是一種連續(xù)、高效工作的生產(chǎn)機械,為了適應高度自動化生產(chǎn)、降低人工強度和成本、穩(wěn)定工作效率,催生了斗輪堆取料機的自動化控制,同時為智能燃料管控系統(tǒng)建立基礎。
2.控制模式分析
(1)手動模式:斗輪機所有的運行機構(gòu)均需要人工操作,操作頻繁、設備運轉(zhuǎn)時間長、損耗大,要求人員注意力長時間集中、時間長、勞動強度大,煤流穩(wěn)定控制難度大、導致工作效率降低。
(2)自動模式:恒流取料提高取料效率、降低設備維護費用,可遠程多臺斗輪機集中控制,增加多種安全防護功能。
3.系統(tǒng)簡介
通過對斗輪機進行自動化改造,增加煤垛建模、料高檢測、煤流檢測、防撞檢測、精準定位、可視化監(jiān)控等數(shù)據(jù)采集模塊,經(jīng)過數(shù)據(jù)運算、分析、判斷,實現(xiàn)斗輪堆取料機對堆取煤、尋跡、流量、運行模式的全自動控制,實現(xiàn)斗輪機無人化、智能化自動控制。極大地提高了斗輪機的作業(yè)效率,大幅降低輸料單位能耗,降低司機勞動強度和改善作業(yè)環(huán)境,大幅減少人員配置數(shù)量,經(jīng)濟、社會效益顯著,也為電廠燃料智能化、智慧電廠的建設奠定基礎。
4.系統(tǒng)圖
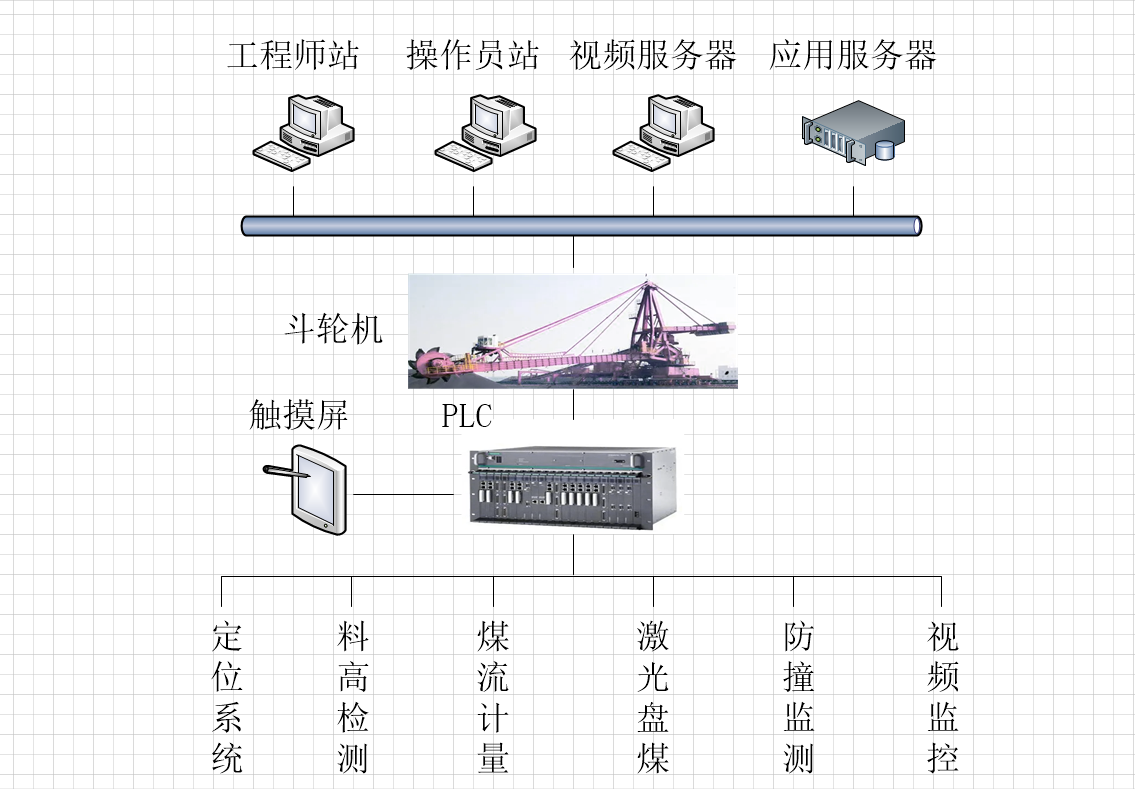
5.系統(tǒng)功能
(1)遠程監(jiān)控中心:
斗輪機全自動系統(tǒng)集控平臺對料垛位置、瞬時流量、斗輪機位置及狀態(tài)等信息進行智能分析和計算,實現(xiàn)斗輪機遠程一鍵式定位及作業(yè)啟停控制,全過程無人干預。實現(xiàn)精準的恒流量取料精確控制,支持多臺斗輪機按照設定比例混配作業(yè)。
通過服務器后臺軟件服務形式建立遠程網(wǎng)絡心跳檢測機制,一旦發(fā)生通訊信號中斷,斗輪堆取料機上自動停機;在輸煤控制內(nèi)集中展示監(jiān)控畫面,以方便操控人員在輸煤控制室內(nèi)集中展示各系統(tǒng)視頻監(jiān)控畫面。集控操作臺上設有急停按鈕,緊急情況下,煤控遠程可緊急操控斗輪堆取料機動力電源斷電。
斗輪堆取料機的控制支持遠程全自動運行方式、遠程手動操作方式、司機室集中操作三種方式。
料堆3D模型動態(tài)更新,滿足自動化作業(yè)要求。操作人員可以在3D圖形上任意一點查詢到該位置坐標數(shù)據(jù)(高度及位置數(shù)據(jù))。斗輪堆取料機工作時,可以通過多個角度觀察當前運行狀態(tài)。操作人員可通過鼠標對系統(tǒng)中三維模型隨意進行平移、旋轉(zhuǎn)、縮放
(2)PLC控制系統(tǒng):
斗輪堆取料機上增加斗輪機全自動控制柜,內(nèi)含PLC模塊、通信模塊、網(wǎng)絡交換機、低壓電氣元件等。
電氣及控制應滿足各機構(gòu)的協(xié)調(diào)、正常和安全運行要求,并提供各類必要的保護,完成對全機各負載的安全控制。
(3)采集傳感裝置:
精準定位:根據(jù)不同工業(yè)現(xiàn)場可通過工業(yè)級衛(wèi)星定位技術(shù)、高精度編碼定位、非接觸式回轉(zhuǎn)/俯仰角度檢測裝置等,并可輔以基于RFID技術(shù)的地址碼位置校準裝置實現(xiàn)定位系統(tǒng)冗余配置,對斗輪機大車、懸臂俯仰/回轉(zhuǎn)角度的實時檢測,精度可達到厘米級。
瞬時煤流、料高檢測:在斗輪堆取料機懸臂皮帶上增加激光掃描裝置,實現(xiàn)取料過程中的實時煤流流量檢測,作為取煤恒流量控制調(diào)節(jié)參數(shù)。在斗輪堆取料機尾車皮帶上增加激光掃描裝置,實現(xiàn)堆料/分流過程中的實時煤流流量檢測,作為自動分流控制調(diào)節(jié)參數(shù)。在斗輪堆取料機懸臂頭部安裝雷達料位檢測裝置,用于探測煤垛料高,參與全自動堆料時料高控制
激光掃描儀:通過安裝于懸臂頭部左右兩側(cè)的激光掃描裝置或者安裝于封閉煤場上部的激光掃描裝置對料垛作業(yè)面進行實時掃描,實時測量服務器完成料垛三維實時建模,得到料垛高精度三維模型,并作為全自動控制的基礎數(shù)據(jù)。
防撞監(jiān)測:在斗輪堆取料機行走軌道前后兩側(cè)分別安裝超聲波傳感器,用于實現(xiàn)堆取料機行走過程中前后距離的測量,防止發(fā)生人員或者設備的碰撞,超聲波傳感器信號接入PLC控制系統(tǒng),實現(xiàn)堆取料機整體的連鎖保護。在斗輪堆取料機懸臂兩側(cè)分別安裝超聲波障礙物檢測裝置,同時跟據(jù)實時建立的煤垛模型與斗輪堆取料機懸臂實時空間位置,系統(tǒng)實時計算兩者相對位置關(guān)系,當位置達到一定設定值時,上位機進行預警,當達到極限值時自動停止旋轉(zhuǎn)并提供報警,人工確認排除后自動恢復旋轉(zhuǎn),實現(xiàn)懸臂軟硬雙重防護。
視頻監(jiān)控:采用多點工業(yè)級高清數(shù)字網(wǎng)絡攝像機,全方位監(jiān)視斗輪機運行狀態(tài)及料場環(huán)境情況。視頻報警聯(lián)動功能,提高系統(tǒng)安全性。
