當前位置:首頁 > 產品中心 > 智慧火電
堆取料機防碰撞控制系統
產品描述:資料更新中...
訂購熱線:0531-61360166 0531-61360266
煤場堆取料機定位系統的建立目的:通過定位堆取料機在軌道的位置,以及定位堆取料機取煤區域的位置,從而實時獲取各區域的取煤位置信息,計算各區域向原煤倉的輸煤量和不同煤種的儲煤量。有了堆取料機精確的位置信息以后,還能實現堆取料機的防碰撞保護,避免生產安全事故的發生。
目前堆取料機位置檢測大多采用的是人眼定位、激光位移傳感器、行走限位開關、RFID方式、加裝刻度標尺精確定位系統的檢測技術。
以上幾種位置檢測方式均存在一定的缺陷,具體表現為:
a.人眼定位受制于眼睛健康狀況和精神狀態,環境影響比較大,作業時間長;
b.激光位移傳感器在不潔凈環境會失去作用,軌道沉降導致車輛走行抖動會使反光板靶位不準,亦會導致位置檢測不準;
c. 行走限位開關由于是點定位,對連續性位置檢測存在盲區;
d. RFID方式是無線點定位,存在漏讀現象, 延時較大;
e. 加裝刻度條方式成本高,安裝復雜,在現場惡劣的環境下容易磨損。
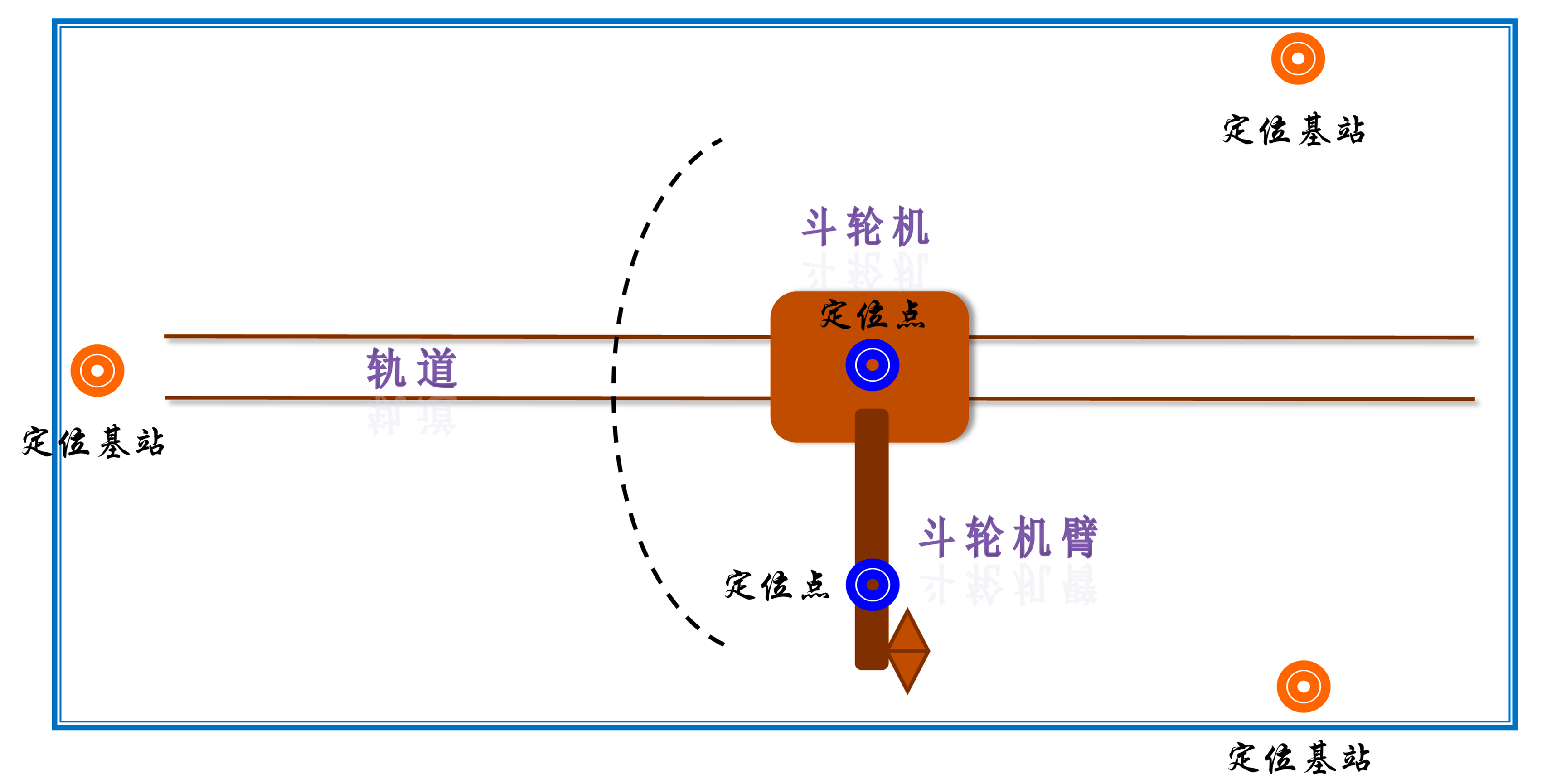
1. 封閉煤場內部堆取料機定位解決方案
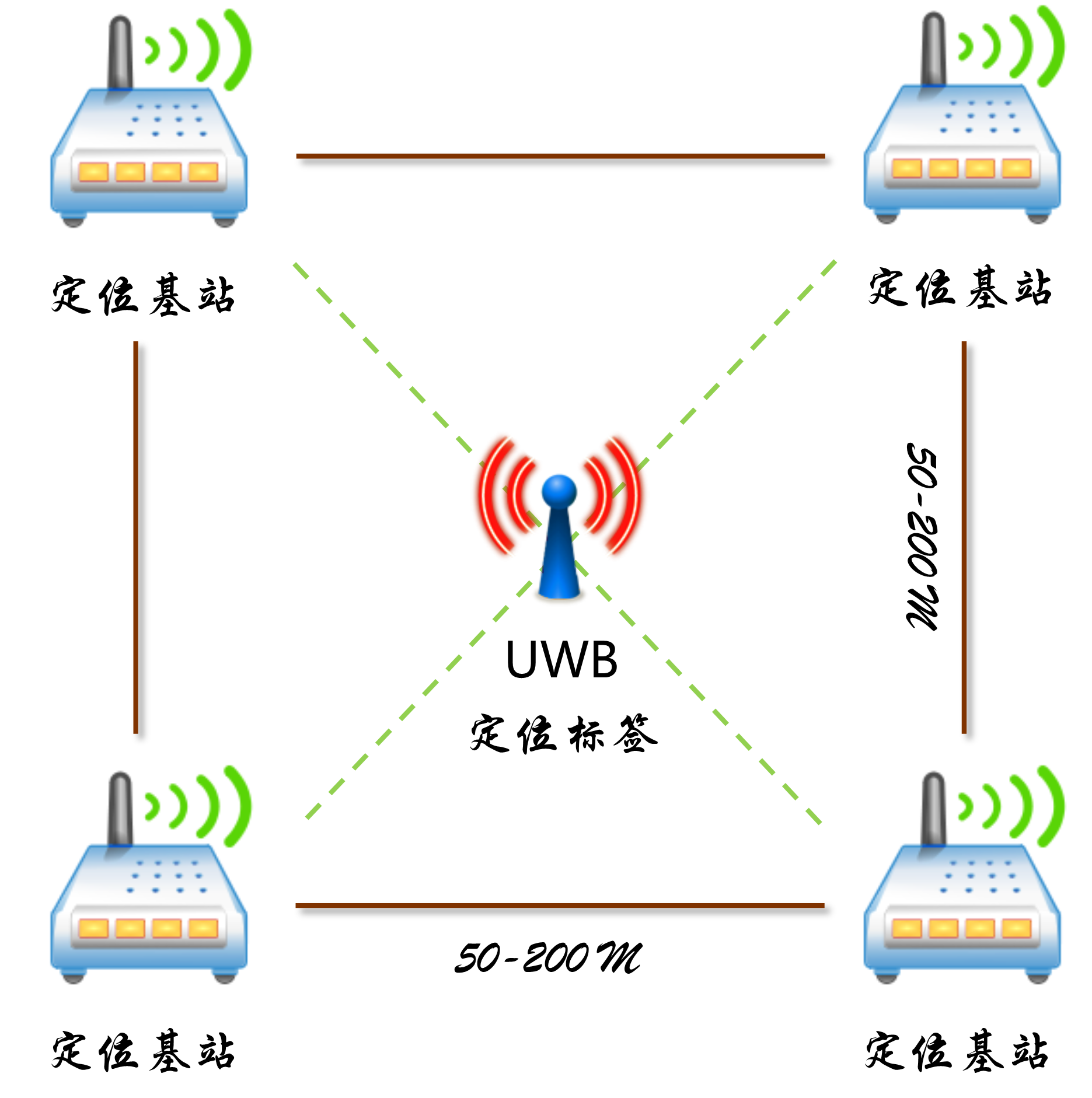
堆取料機在封閉煤場內部無法采用衛星定位技術,基于室內的各種定位技術中目前精度最高、最成熟的為UWB定位技術。UWB無線定位的一般精度為10cm,最高精度可達到5cm以內。
UWB無線定位原理:無線基站位置已知,標簽發出無線脈沖信號,根據標簽到達每個基站的時間乘以光速,得到標簽至每個基站的距離,再通過算法求解,最終得到標簽的位置,從而實現標簽定位。
通過在每個封閉煤場頂部和馬道上安裝多個室內定位基站,在堆取料機上安裝定位終端,實現堆取料機的精確定位。通過堆取料機定位系統的精確定位信息,實現按計劃的堆取料機取煤規范管理,當取煤區域與計劃取煤區域位置不符合時,實現系統的自動聲光報警,提示堆取料機操作員。實時監控斗輪機的位置信息,降低堆取料機撞擊風險。
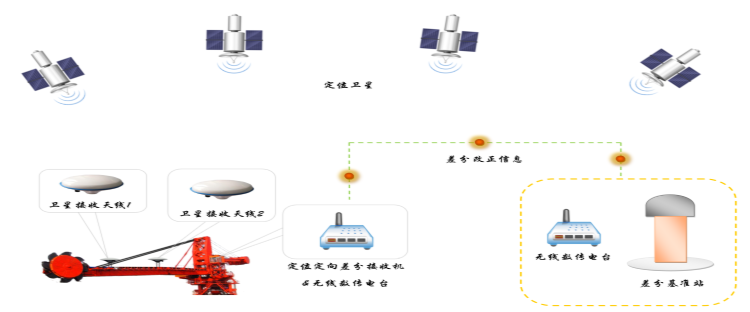
2. 露天煤場堆取料機定位解決方案
露天煤場堆取料機主要采用差分基站定位技術,利用基于載波相位觀測值的實時動態定位(RTK)技術,能夠實時地提供測站點在指定坐標系中的三維定位結果,并達到厘米級精度。在RTK作業模式下,基準站通過數據鏈將其觀測值和測站坐標信息一起傳送給流動站。流動站不僅通過數據鏈接收來自基準站的數據,還要采集北斗/GPS觀測數據,并在系統內組成差分觀測值進行實時處理,同時給出厘米級定位結果。
濟南祥控自動化設備有限公司 Copyright 2020 技術支持:zlxk 魯ICP備14011903號 網站地圖

 產品詳情
產品詳情